2681 篇
1100 篇
195122 篇
3409 篇
6328 篇
2250 篇
2838 篇
539 篇
29836 篇
10204 篇
3209 篇
773 篇
2312 篇
1329 篇
451 篇
753 篇
1392 篇
2645 篇
2752 篇
4099 篇
新型智能床椅一体化机器人设计
1 研究背景及意义
随着社会发展,人口老龄化已经成为21世纪不可逆转的趋势,人们对医疗护理设备的需求不断提高,对于失能老人的照料与看护问题成了越来越突出的社会问题。与此同时,服务机器人在国内外市场的增速越来越快,预计2020年~2022年,全球的服务机器人平均将会有30%以上的持续增速[1]。因此,为了使病床与轮椅两者有效结合,减轻医护人员照顾失能老人的过程中病人在病床和轮椅上转移的工作量,避免病人二次受伤。该文设计了一种新型智能床椅一体化机器人,该结构既是多功能护理床,又是智能轮椅,具有床椅分离、背部抬升、头部抬升、腿部抬升、防跌倒以及防坠床等功能。可以实现轮椅和病床主体结合与分离,且轮椅折叠与展开操作简便,方便患者出行活动,不仅可以在医院使用,也可以在家中使用,服务于更多在家中疗养的患者以及行动不便的老人[2]。
2 具体结构设计
该新型智能床椅一体化机器人设计可以实现轮椅和病床主体智能控制结合与分离,病患所需要做的只是从床的中间挪动轮椅部分即可完成从卧床到坐上轮椅出行的动作,可以减少甚至不需要其他辅助起床,轮椅可单独使用,方便患者出行活动。主要由床体部分和智能轮椅部分组成。
床板和轮椅支架上还分别设计安装了床体控制箱和轮椅控制箱,床体电动推杆与床体控制箱电连接,轮椅电动推杆、升降驱动机构均与轮椅控制箱电连接。升降驱动机构包括依次连接的升降电机、齿轮传动组件以及丝杠螺母组件。齿轮传动组件包括主动齿轮以及从动齿轮,丝杠螺母组件包括升降丝杠以及升降螺母。
2.1 床体部分
床体部分包括床支架、床架、床垫、背部抬升推杆,安装在床架之下。床轮安置在床支架底部。扶手安装在床架一侧。床轮采用万向轮装置,方便病床移动。床板、床垫、轮椅架和轮椅垫可拆卸,方便对整个病床进行维修和清洗。
2.2 智能轮椅部分
可分离智能轮椅部分包括轮椅支架、轮椅架、轮椅垫以及电动推杆,安装在轮椅支架上。前万向轮安装在轮椅支架底部前部。后轮安装在轮椅支架底部后部。扶手安装在轮椅架两侧,分别为固定扶手和可升降扶手。轮椅部的后轮上还设计了驱动电机,驱动电机与轮椅控制箱电连接,用以控制轮椅部分实现与床体部分自由结合分离过程,方便患者的移动,轮椅可单独移出使用。电动推杆主要实现背部、腿部联动,实现轮椅平床模式与轮椅模式之间的转换及头部抬升功能。
3 具体实施过程
如图1所示,一种新型智能床椅一体化机器人,其特征在于,包括轮椅部分1、病床主体部分2[3]。病床部分和轮椅部分可通过智能控制,实现自动分离结合,分离轮椅作为智能轮椅可单独使用。
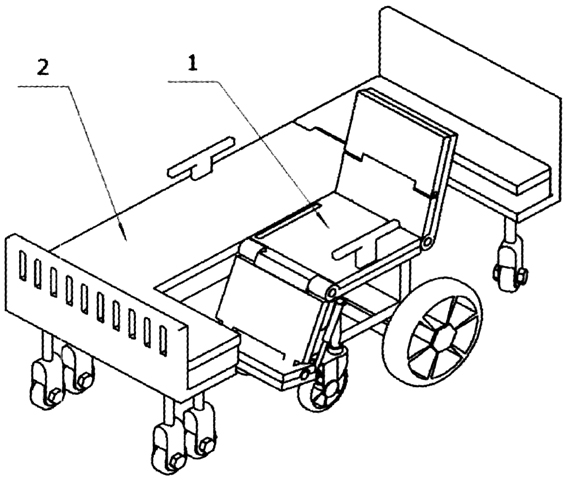
图1 床椅一体化结构
如图2所示,单独轮椅部分包括轮椅支架1.3,轮椅后轮1.4和轮椅前轮1.5安装与轮椅支架1.3底部,轮椅架1.2安装于轮椅支架1.3上,轮椅垫1.1和扶手1.7安装在轮椅架1.2上,电动推杆1.6安装在轮椅支架1.3和轮椅架1.2上。

图2 轮椅结构图
具体实施过程如图3所示,多处电动推杆1.6由控制器控制,实现背部底架、腿部底架、踏板底架抬升动作,可在参数范围内自由调节轮椅背部、腿部倾斜程度,使患者有更舒适的体验。

图3 轮椅平床模式
轮椅扶手安装在轮椅座板两侧,分别为固定扶手和升降。坐板的一侧开设计有对接口,在对接为床状态时,对接板与对接口对应连接。升降扶手设在坐板开设有对接口的一侧,轮椅支架上还设有升降驱动机构,升降驱动机构与升降扶手连接,通过升降驱动机构实现升降扶手的升降。升降驱动机构包括依次连接的升降电机、齿轮传动组件以及丝杠螺母组件。升降电机与轮椅控制箱电连接,丝杠螺母组件与所述升降扶手连接,升降电机通过齿轮传动组件传动丝杠螺母组件,从而驱动升降扶手实现升降,使床椅精准、稳定结合。
床体部分如图1所示,包括床支架,6个万向床轮安装在床支架底部,床架安装在床支架上部,床垫安装在床架上,扶手安装在床架上,电动推杆安装在床架上。
具体的实施过程为床体安装万向床轮,方便移动,电动推杆由控制器控制,可实现头部抬升,在参数范围内自由调节合适高度。
该发明还包括控制器、电机和激光传感器,控制器安装在轮椅支架1.3和床体部分床架上,用于控制电动推杆调节病床和轮椅,安装在轮椅支架1.3的电机通过齿轮传动用于驱动轮椅上可动扶手的升降动作和轮椅后轮1.4,激光传感器安装在轮椅床体连接固定装置和轮椅可动扶手处,实现轮椅和床体连接时精准快速定位[4]。
4 工作原理
该发明新型床椅一体化机器人可实现卧床病患自主控制自己起卧和移动。当病患需要起床出门时,须自己先移动到病床轮椅一侧,然后通过控制轮椅由平床模式转换为轮椅模式,再控制轮椅移动出来,即可进行轮椅单独使用。
当病患需要回床休息时,操作轮椅到达床体一侧相应位置处,使用轮椅和床体自动结合功能,实现轮椅和床体精准快速结合,在调节轮椅变为平床模式即可进行休息。床椅一体化模式时并且还需要做起休息时,可通过控制器控制头部抬升至合适做起位置。
整个过程采用智能控制,实现床椅分离、头部抬升、背部调节、腿部调节、背膝联动、轮椅转向等控制。达到方便患者在生活中的简单自理,减轻医护人员和家属的压力。
5 结语
该设计是一种新型智能床椅一体化机器人,该设计结构可实现病床和轮椅的有效结合,符合人体工程学设计,既解决了医护人员将病人在病床和轮椅之间的转移过程的困难,也避免病患在转移过程中受到二次伤害,适用于医院卧床病患和家庭失能老人等广泛群体[5]。操作过程采用智能端控制,使用者通过智能控制面板即可控制床椅分离、背部抬升、腿部抬升等动作,操作简单,方面患者自由自理生活。国内市场目前在该方面发展还不够完善,无法达到简单操作控制实现全面功能,因此不能在市场普及。而该产品功能齐全,操作简单,可靠性好,成本低,可在市场推广使用。


 027-87841330
027-87841330